






")
")








技術サポート
モーターの技術サポートを通して、モーターについてのより多くの単語、選択方法、そして最適な製品仕様を見つけるための使い方を見つけることができます。
モーターワード説明
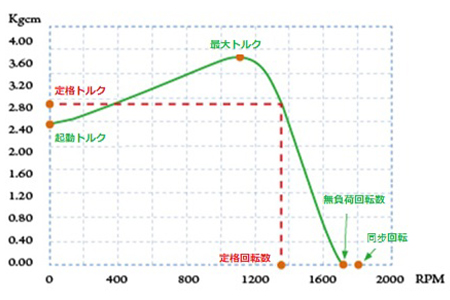
評価済み
定格は、モータの出力電力、電圧、電流、周波数、トルク、速度など、モータの仕様上の使用制限です。 温度上昇の場合は、連続定格と短時間定格の2種類に分けられます。
同期スピード
- モーターの周波数と極数によって、モーターの速度が決まります。 参照式は次のとおりです。
- Ns =(120 xf)/ P
- Ns:同期速度(rpm)
- 120:定数
- f:頻度
- P:極数
定格スピード
定格電力での定格速度は定格速度です。
無負荷速度
無負荷状態でのモーターの速度。
連続定格および短時間定格
連続定格とは、モータが定格出力で連続して動作することを意味し、短時間定格とは、モータが指定された時間内に定格出力で動作することを意味します。
出力パワー
- これは、モータが1単位時間内にできる仕事を示しており、モータの仕事は速度とトルクによって決まります。 参照式は次のとおりです。
- 出力(Kw)=(T×N)/ 97400
- T:トルク(Kgcm)
- N:スピード
- 1HP:0.746Kw
始動トルク
モータの始動時に瞬間的に発生するトルクで、負荷がこのトルクより大きいとモータは始動しません。
スリップ率
- 速度を表す方法の一つであり、参考式は次の通りです。
- S =(Ns - N)/ Ns
- S:スリップ率
- Ns:同期速度(rpm)
- N:あらゆる負荷の下での速度(rpm)
モータ選定方法
01
減速比の計算式
減速機の出力速度と機械的な戻り速度に応じて最適な減速比を選択してください。(定速)
- i = Nm / Ngまたは1 / i = Ng / Nm
- i:減速比
- Ng:減速機のスピード(rpm)
- Nm:モーター回転数(rpm)
02
直結減速機のトルク計算式
減速機の出力トルクと機械的トルクに応じて最適な機種を選択してください。(固定トルク)
- Tg = Tm xixη
- Tg:減速機出力トルク
- Tm:モータ出力トルク
- i:減速比η:減速機の伝達効率
最大許容トルク
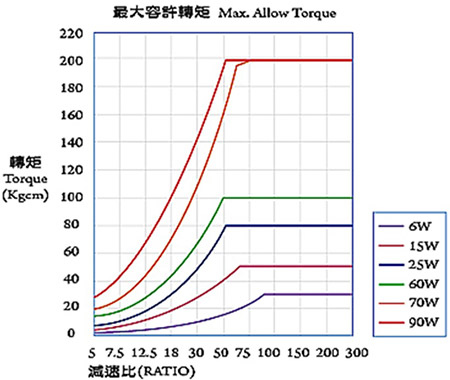
減速機の出力トルクは上式により算出され、減速度が比較的大きい場合は歯車材料、歯車箱材料および減速機自体の設計上の負荷トルクが制限されるため、各機種の許容公差は最大となります。トルク制限
モータ容量の基本式
最大許容トルク
- Pg =(P1 + P2 + P3)×100 /η[W]
- P1 = 9.8×μ×W×V×λ[W]
- P2 =(μ×Q×λ)/ 367 [W]
- P3 =±(Q×H)/ 367 [W]
- λ:コンベアの長さ(m)
- W:ベルトユニット長さの重量(kg / m)
- μ:摩擦係数
- V:ベルト速度(m /秒)
- Q:配達量(kg / h)
- η:効率(%)
- H:傾斜コンベア両端の高低差(m)
積荷が積み上げられたとき
Pg =(W×V)/(6×12)×(100 /η)[W]
慣性体が駆動される場所
- Pg = 1.027 NT [W]
- T≒(GD2 / 375)×(N / t)[kgf×m]
- N:毎分回転数(rpm)
- T:トルク(kgf×m)
- GD²:フライホイール効果(kgf×m2)(ローター付きフライホイール効果)
- t:起動時間(秒)
接触面が水平に移動する場所
Pg =(μ×W×V)/(6×12)[W]



